
The Guide to PID Tuning
Accomplish optimized plant performance with the PID tuning guide
#downloads
Insight Reports
#pid-tuning
What is PID Tuning?
In an industrial plant, tuning PID loops is a time-consuming and difficult job. To achieve optimal results, it’s essential to prevent the PID loops from oscillating or producing undesired overshoot. However, finding the ideal set of parameters for each specific situation is almost an art — it requires experience.
There are many different methods to tune your PID loops: trial and error, Ziegler-Nichols, Cohen-Coon, or model-based PID tuning with PID tuning software. If you focus on understanding the PID tuning process instead of just using your gut-feeling, you provide more added value to your plant operations. Learn everything you need to know in our PID tuning Guide.
In many industries, PIDs are the most widely used feedback controllers. Finding the right P, I, and D parameters enables optimal performance.
Read about:
- The definition of PID tuning
- How to reach an optimal PID tuning based on process behavior and engineering specifications
- The benefits of PID tuning
#parameters
PID Tuning Parameters
When PID parameters aren’t tuned correctly, your control loop can show undesired oscillations and/or overshoot. Therefore, it’s vital to choose the right set of PID parameters to achieve optimal plant performance.
- An explanation of the Proportional action (P).
- The effect of the Integral action (I).
- The benefits and risks of the Derivative action (D).
#tuning-methods
PID Tuning Methods
The concept of PID tuning might be simple, but the underpinning PID control mathematics are complex. There are three main approaches, each with various tuning methods providing different results.
Approaching PID tuning from a different angle:
- The three approaches on how to tune the PID control loop
- Heuristic PID tuning
- Rule-based PID tuning
- Model-based PID tuning
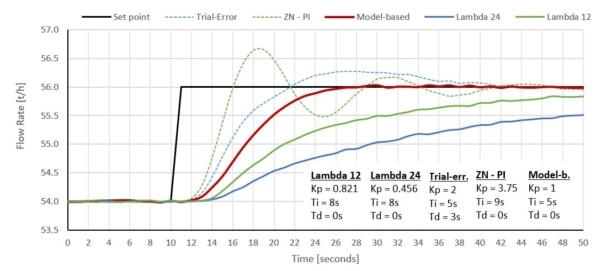
#tuning-example
PID Tuning Example
What’s the best way to tune PID loops? We give an in-depth explanation of all the benefits and limitations of heuristic, rule-based, model-based PID tuning based on a common example.
Other methods:
- Heuristic PID tuning in practice
- Rule-based PID Tuning in practice
- Model-based PID Tuning in practice
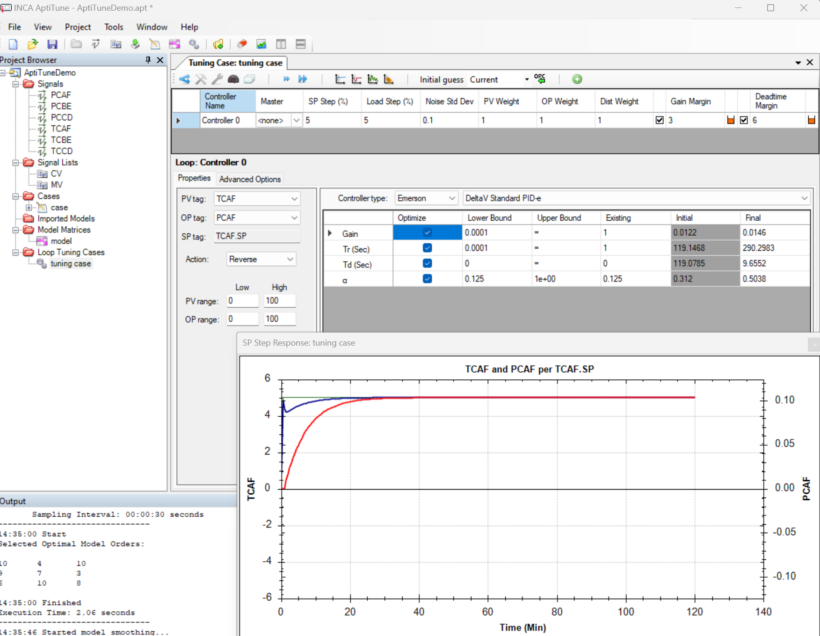
#tuning-software
PID Tuning Software
The ultimate goal is to set the PID parameters right the first time. This is nearly impossible without PID tuning software. Tuning software allows you to specify your engineering objectives to obtain the perfect PID control-loop.
Further reading:
- Why model-based tuning is perfect for PID tuning
- Explanation of PID tuning software
- The benefits of using the tuning software from Orise Digital’s APC Suite
